Приложения
Любая технологическая операция без обратной связи характеризуется набором опорных положений и ориентаций рабочего инструмента. Их объединение будем называть операционным вектором или опорным вектором.
Для каждого опорного вектора с помощью решения обратной задачи кинематики определяются углы поворота звеньев. Иными словами, все опорные векторы технологической операции переводят в опорные конфигурации.
Если между опорными конфигурациями достаточно большое расстояние, то двигаясь пропорционально вдоль каждой из осей, робот может встретить препятствия или столкнуться сам с собой.
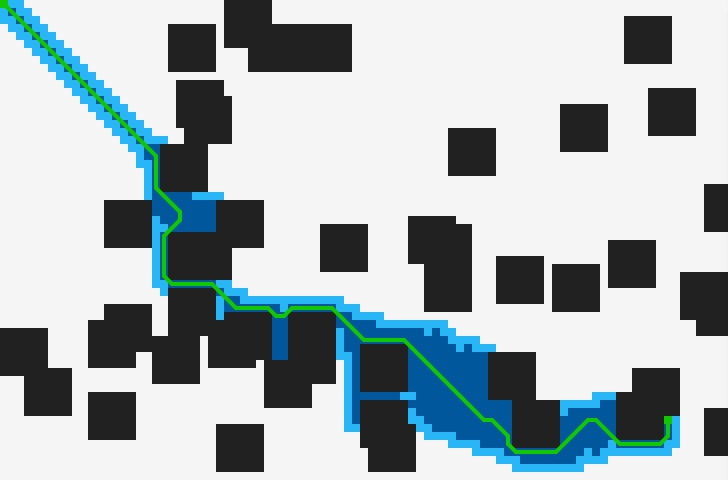
Чтобы решить эту проблему, используют алгоритмы поиска пути. Путём называется последовательность конфигураций робота, каждая из которых не соответствует столкновению (коллизии). При этом чаще всего основным параметром планировщиков пути является максимальное расстояние между новыми опорными конфигурациями.
Чтобы запустить сервер непрерывного планирования, используйте команду
bmpf_continuous_pf_server -s ~/bmpf/config/murdf/4robots.json
Путь к сцене - обязательный параметр, остальные можно постмотреть с помощью команды
bmpf_continuous_pf_server -h
Исходники клиентов лежат в зедсь
Планировщик в режиме multirobot
bmpf_multirobot_pf_server -s ~/bmpf/config/murdf/4robots.json
Чтобы просмотреть построенный путь, используйте приложение
bmpf_trajectory_finding_server
Сервер оптимизации
bmpf_multirobot_pf_server -s ~/bmpf/config/murdf/4robots.json
Сервер построения траекторий
bmpf_trajectory_finding_server -s ~/bmpf/config/murdf/4robots.json