Сцена
Каждый манипулятор можно описать набором звеньев (links) и сочленений (joints)
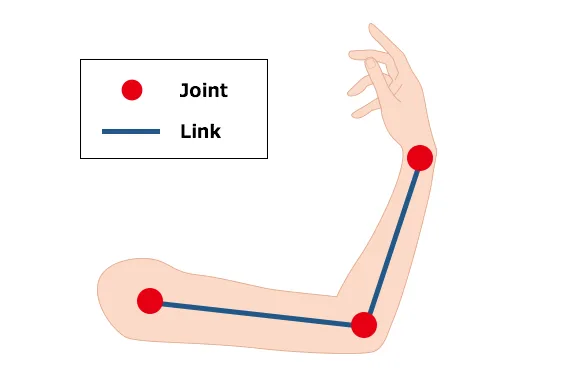
Математические звенья - это математическое описание всей геометрии соответствующего реального звена робота, его масса, моменты инерции.
Под математическими сочленениями принято понимать ось вращения или смещения установленного на нём звена (в данном фреймворке все звенья полагаются вращательными) и значение соответствующей координаты. Такие координаты принято называть обобщёнными. У вращательных звеньев обобщёнными координатами являются углы поворота.
*.urdf. Подробнее с его
описанием можно ознакомиться здесь.
Для работы с системой роботов бывает удобно рассматривать их как единого робота, а иногда удобно рассматривать их по отдельности.
Поэтому для описания системы роботов (сцены) разработан
довольно простой формат *.murdf.
Пример файла описания сцены:
{
"robots" : [
{
"model" : "../../config/urdf/kuka_six.urdf",
"pos" : [ 0, 0, 0 ],
"rpy" : [ 0, 0, 0 ],
"scale" : [ 1, 1, 1 ]
},
{
"model" : "../../config/urdf/tetris_4.urdf",
"pos" : [ 0, 0, 0.85 ],
"rpy" : [ 0, 0, 0 ],
"scale" : [ 1, 1, 1 ]
},
{
"model" : "../../config/urdf/sphere.urdf",
"pos" : [ 1.03, 0.450, 0.64 ],
"rpy" : [ 0, 0, 0 ],
"scale" : [ 2.03, 1, 1 ]
}
],
"name" : "saved scene"
}
Он является надстройкой
над json. Для каждого робота указывается путь к его описанию, а также три
вектора, описывающие его трансформацию:
- смещение: , ,
- углы поворота: крен (roll), тангаж (pitch), рыскание (yaw)
- коэффициенты масштабирования вдоль осей:
Редактор сцены
Для работы со сценой написано графическое приложение
bmpf_scene_editor
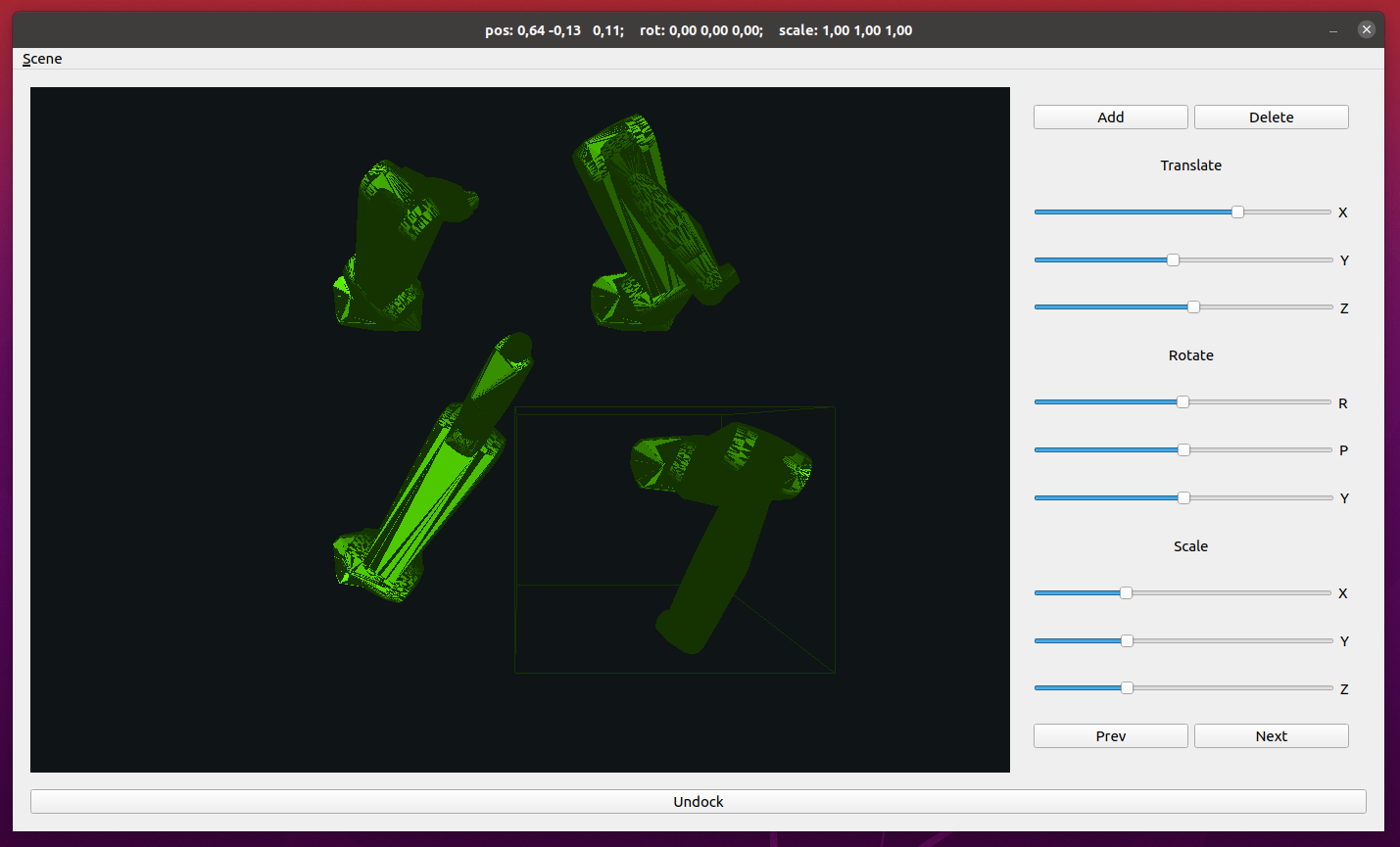
Этот редактор также позволяет удалять и добавлять новых роботов на сцену